DQN的论文地址:Playing Atari with Deep Reinforcement Learning
DQN属于是Q-learning算法,是一种无模型、异步异步、时间差分的控制算法,使用深度模型来拟合值函数。
DQN使用原始图片作为输入,就是原始图片的像素值,将每个动作的Q值作为输出。而对于输入来说,并不是每一帧都会作为输入,而是连续四帧的序列作为输入,因为从一帧难以捕捉太多信息。也就是说这个MDP中的状态表示是一个四帧的像素向量。
DQN使用了经验回放(experience replay)。对于在线的强化学习方法来说,就是代理边采取动作边观察来进行在线更新,这样会有一些问题,比如生成的样本会跟你的动作有关,或者说观察到的状态会受到你的动作执行的影响。那么经验回放是什么意思呢?通俗来说就是使用一个数据池来存储前面使用过的数据,后面还会用到这些数据。经验回放的优点:
- 每个数据样本可以被使用多次,提高采样效率
- 由于连续样本之间的强相关性,从连续的样本中学习不高效,而随机这些样本可以打破这种相关性,可以减少更新过程的不稳定性
- 如果是同步策略学习,下一个数据样本会受到当前参数的影响,可以使得陷入局部最小。比如有两个动作空间的游戏中,向左移动那么下一个样本状态受限于左手区域,反之向右移动下一个样本状态受限于右手区域。而经验回放可以有效解决这一问题。
同时在使用过程中,数据池的大小 $N$ 也是一个超参数,有相关论文研究这个问题。
DQN算法的损失函数为
梯度为
其中 $\rho(\cdot)$ 表示状态s和动作a的概率分布, $\varepsilon$ 表示随机的MDP环境。
DQN算法的步骤为
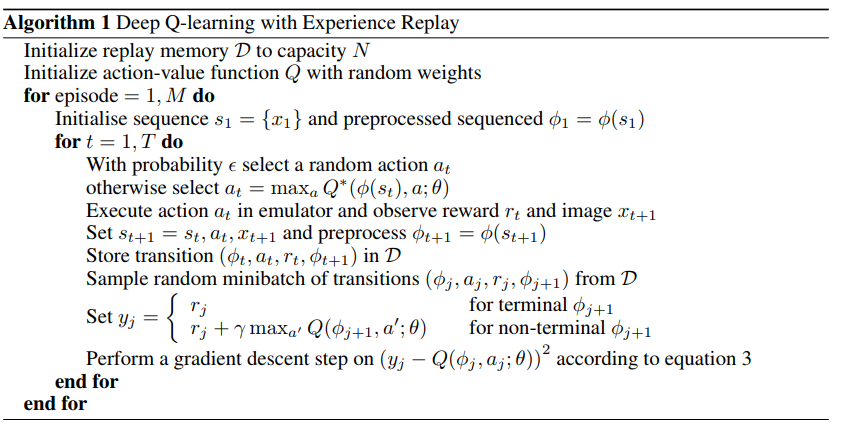
可以看到DQN算法在更新时并不是使用即时生成的样本来更新,而是从经验回放的数据池中随机抽取样本进行更新。
论文中实验的一些相关细节:
- 输入层为84*84*4的向量,第一个隐藏层为 16 个 8 * 8 步长为 4 的卷积核以及 relu 激活函数,第二个隐藏层为 32 个 4 * 4 步长为2的卷积核以及 relu 激活函数,最后一个隐藏层为 256 个单元的全连接层以及relu激活函数,输出层的单元数为动作空间的大小,并且为线性层
- 不同游戏使用相同的网络结构、学习算法、超参配置
- 在训练阶段,会调整奖励机制,正奖励设为1,负奖励设为-1,无奖励为0,因为不同的游戏奖励大小无法比较,这会影响到误差梯度的大小,从而不能使用相同的学习率
- 都是用RMSProp优化算法
- 批量大小为32
- $\epsilon-greedy$ 中的 $\epsilon$ 在前100万帧样本从1变到0.1,之后固定为0.1
- 训练样本量为1000万帧,经验回放大小为100万
- 每个$k = 4$帧进行动作选择,中间跳过的帧保持执行上一个选择的动作,因为动作选择耗时太长,如果每帧都选择动作时间上不允许
论文在7个Atari游戏中做了实验,其中六个超越了当前的所有方法,三个超越了人类水平。